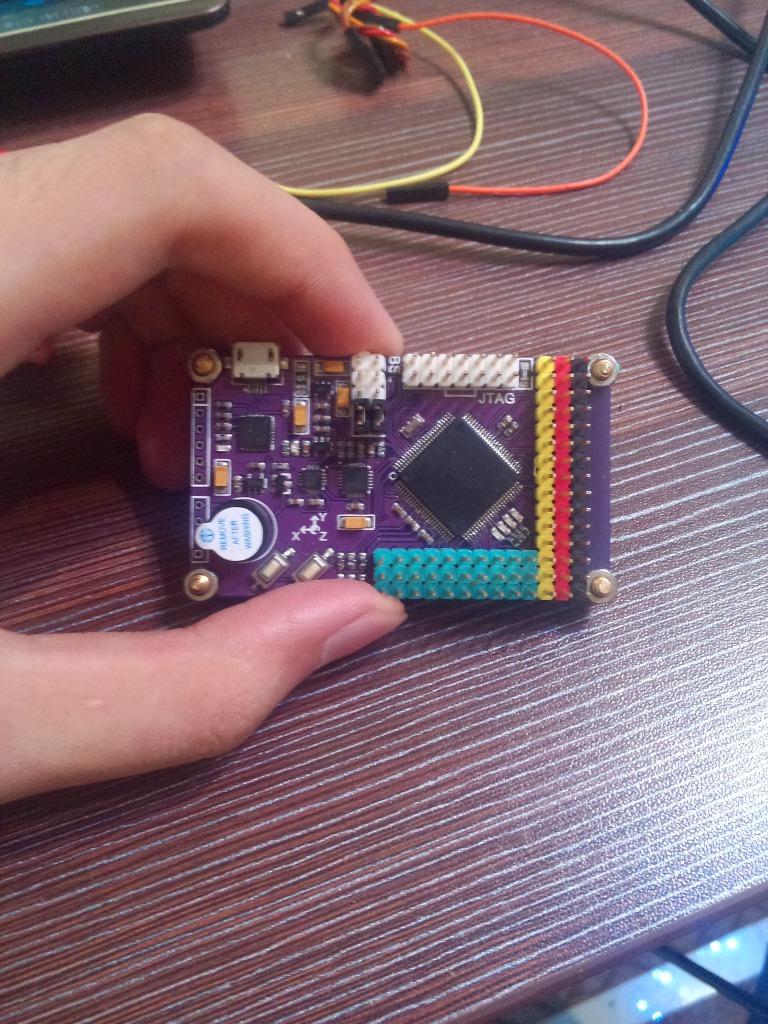
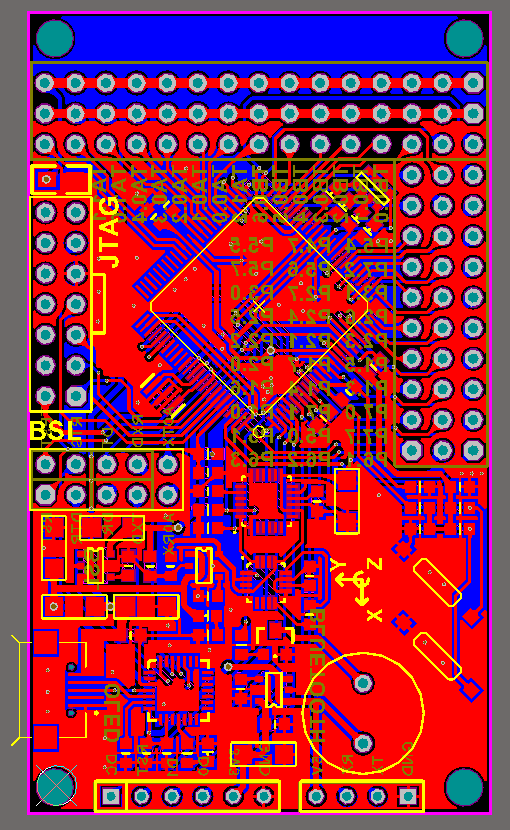
原理图说明:
1、主控MCU采用MSP430F5438A;
2、采用25MHZ外部晶振;
3、加速度计和陀螺仪采用MPU6050;
4、磁力计采用HMC5883L;
5、添加了四个LED灯,两个按键和一个蜂鸣器;
6、集成了CP2102 USB转TTL芯片;
7、支持BSL/SBW/JTAG下载,BSL用串口下载就行,但是不能仿真~
代码说明:
1、目前基于IAR6.1版本,但是出于最新版本没法破解,打算用回低版本的;
2、采用模拟IIC读取MPU6050和HMC5883L,还是模拟的用着顺手;
3、主频25MHZ,3ms姿态解算周期,应该够用了;
4、姿态解算用的是四元数算法,串口发送;
5、还没有添加电机控制部分,以后会不断更新;