作者:sword__yang
【导语】:高端的音响设备目前已经大量采用了先进的控制技术,其中使用单片机(MCU)控制是必不可少的,举凡遥控、显示、电子音量控制等都离不开单片机。本文拟通过几个单片机的应用实例来和大家分享一下自己的DIY心得。(文中所有的程序实例都已经在PIC16F873A单片机上通过实验的检验)。
本文共有4个部分:
一、旋转编码器的解码
二、电子音量控制
三、荧光显示VFD、按键控制
四、红外遥控解码
音响应用之一:旋转编码器的解码
旋转编码器(外形参见图II-1.0)在音响中多用于取代普通的滑动电阻电位器作为音量/音调控制的编码输入。它使用寿命长达100万次,比普通电位器长得多,而且不会因为机械磨损造成阻值的偏差,影响声道的平衡。其调节的精度仅仅取决于与MCU配合的音量控制芯片的控制级数,与本身的旋转角度无关,这也是普通电位器无法做到的,因此旋转编码器也大量地用于精密仪器的调节上。
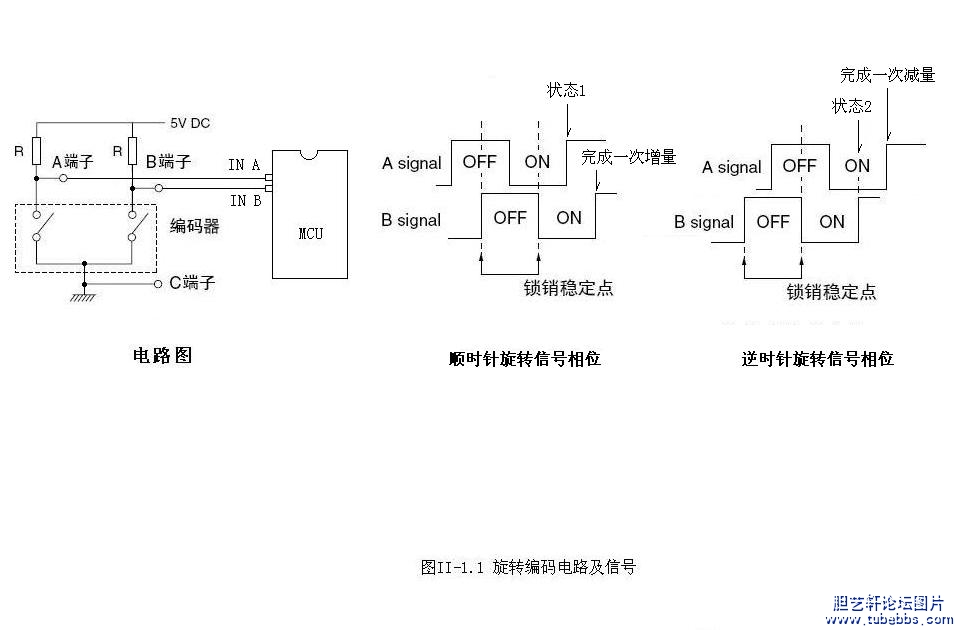
旋转编码器内部就是两个长寿命开关,可以根据旋转方向产生不同相位信号。电路如图II-1.1所示:当我们顺时针旋转时,开关A的输出信号A signal相位超前;如果我们逆时针旋转时,则是开关B的输出信号B signal相位超前,我们把A/B端分别接到MCU的两个输入端口,并在MCU内设置一个音量计数器;就可以用软件来判别是顺时针旋转还是逆时针旋转,以此判断是增加还是减少音量计数器的值,最后把这个计数值送到相应的电子音量控制芯片就可以实现音量(或者其他需要增量/减量的)控制了。
由于旋转编码器是随时改变的,我们的软件也要能够跟踪各个瞬时的状态变化,为了判断旋转编码器的相位我们还需要用三个标志位(Bit变量)来记住开关A,B的“瞬时状态”。
(原文件名:1.jpg)
(原文件名:2.jpg)
旋转编码器的解码例程如下:
【说明】: Bit变量定义:状态1:FLG0,ECA 当开关A变高,B变低时,置位(设为1),为即将到来的增量做准备;状态2:FLG0,ECB 当开关A变低,B变高时,置位(设为1),为即将到来的减量做准备;状态3:FLG0,ECV: 当完成一次增加/减少时,置位(设为1),相位变动一次,只做一次增/减量;变量寄存器:VOLUE 用来保存音量变化数值。 16F873A的I/O端口B: VOA:连接到编码器的A端子; VOB:连接到编码器的B端子。
;======================================
VOLUME_CONTROL:
BTFSC FLG0,ECA ; “状态1”检测:若已经满足了状态1,就去查看开关B是否变高
GOTO KE_1E
BTFSC FLG0,ECB ; “状态2”检测:若已经满足了状态2,就去查看开关A是否变高
GOTO KE_1F
BTFSS PORTB,VOA ; “IN A”检测
GOTO KE_1B
KE_1A:
BTFSC PORTB,VOB ; “IN B”检测
GOTO KE_1D
BTFSC FLG0,ECV
GOTO KE_EX
BSF FLG0,ECA ; 满足“状态1”的设置条件
GOTO KE_EX
KE_1B:
BTFSC PORTB,VOB
GOTO KE_1C
BCF FLG0,ECV ; 清除“状态3”
GOTO KE_1D
KE_1C:
BTFSC FLG0,ECV
GOTO KE_EX
BSF FLG0,ECB ; 满足“状态2”的设置条件
GOTO KE_EX
KE_1D:
BCF FLG0,ECA
BCF FLG0,ECB
GOTO KE_EX
KE_1E:
BTFSS PORTB,VOB ; “状态1”下,开关B变高?
GOTO KE_EX
INC_VOL:
BCF FLG0,ECA ; 是的,完成一次增量, 清除“状态1”
BCF FLG0,ECB ; 清除“状态2”
BSF FLG0,ECV ; 设置“状态3”
INCF VOLUE,F ; 音量寄存器加1
GOTO KE_EX
KE_1F:
BTFSS PORTB,VOA ; “状态2”下,开关A变高?
GOTO KE_EX
DEC_VOL:
BCF FLG0,ECA ; 是的,完成一次减量,清除“状态1”
BCF FLG0,ECB ; 清除“状态2”
BSF FLG0,ECV ; 设置“状态3”
DECF VOLUE,F ; 音量寄存器减1
KE_EX:
RETURN
;=====================================
;开关的瞬时位置比较抽象,大家要对比波形图和软件的状态去加深理解。