单片机:STM32F103RCT6
滤波:卡尔曼
驱动:75F75场效应管+ IR2101S
电池:36V12AH锂电池
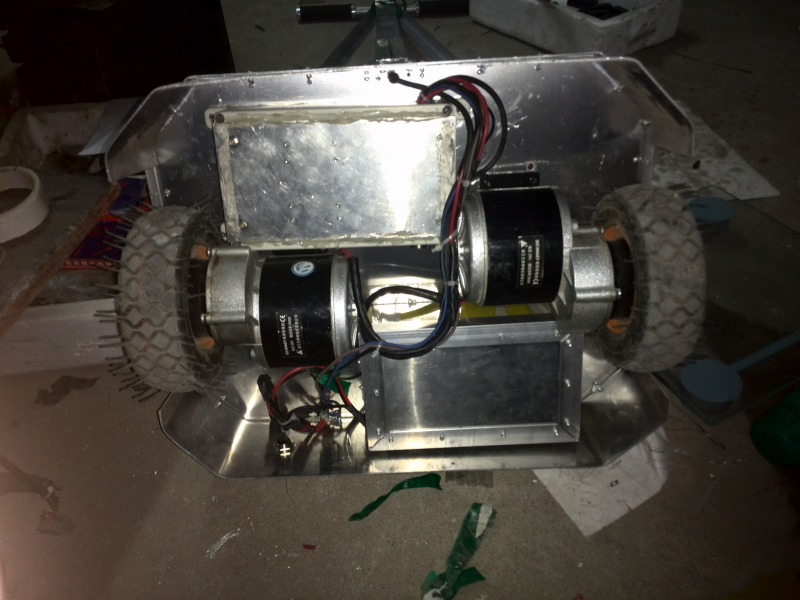
电机:优耐特36v350w外头电机
轮胎:6寸充气轮胎
价格参考
电路板200元,电池650,外壳100,轮胎40,法兰盘100,电机300。加起来1500元不到吧。
我的PID算法只用到了两个量,一个角度比例,还有一个市陀螺仪积分吧。主要是载人的,不需要位移量和转速量,载人的不需要定下来,主要是靠人来调节前后,速度。
我的角度测量是用的重力加速度的分类,用三角函数计算出来的。假如向前,有点左右歪,角度一样没问题。
程序分为四个部分,大家慢慢研究。不要说我的电机噪音大,做工粗糙,等我有空,我会做个升级版的。我今年22周岁还不到,马上专科毕业,谁敢站出来和我比嫩!
在这里感谢那个牛人开源了源代码,大家应该知道是谁。我是做自动化行业的,做这个纯属爱好。所以开源完全是回报社会,下载附件之后点个赞啊,我很要面子的。不要做伸手党啊!
我上传了我的源代码,欢迎大家下载。还有pcb图。欢迎大家讨论。我的qq是991520912,十万伏特
http://player.youku.com/player.php/sid/XNjY0NjAyNjAw/v.swf