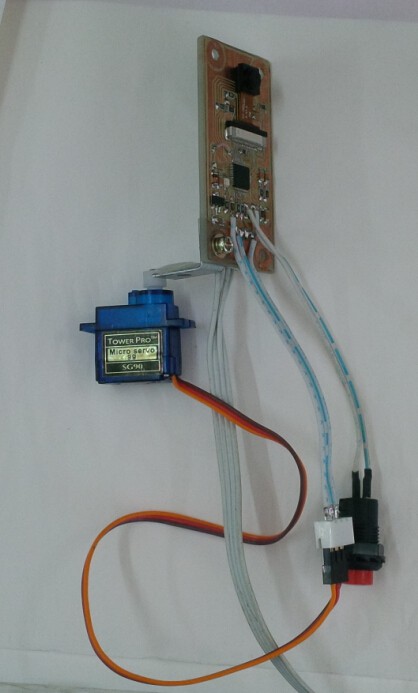
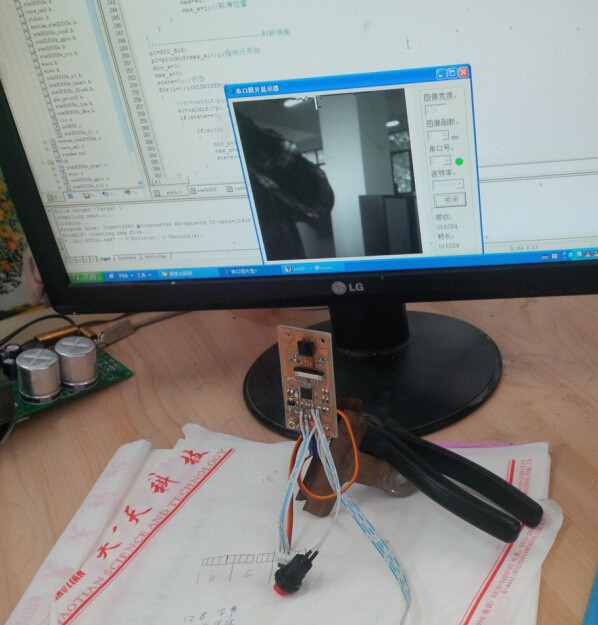
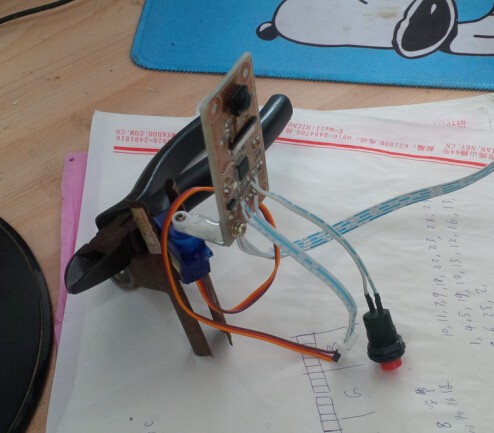
电路和另一个帖子一样只是将PA14引出控制舵机简介:STM32采集OV7670的图像,经图像处理后,产生PPM信号驱动舵机用于跟随运动物体。硬件上为PA14产生PPM驱动舵机。图像处理算法:对当前每列相素求平均值,与上次的列相素平均值求差,当从min列到max列有较大变化时认为运动物体的中心在(min+max)/2处。GIF效果: 总成:
oxygenhan 楼主有联系方式没有,有问题求助