很早以前在RTT上做的S型电机加减速表计算,为了配合理解,做了一个EXCEL的数学模型传上来:
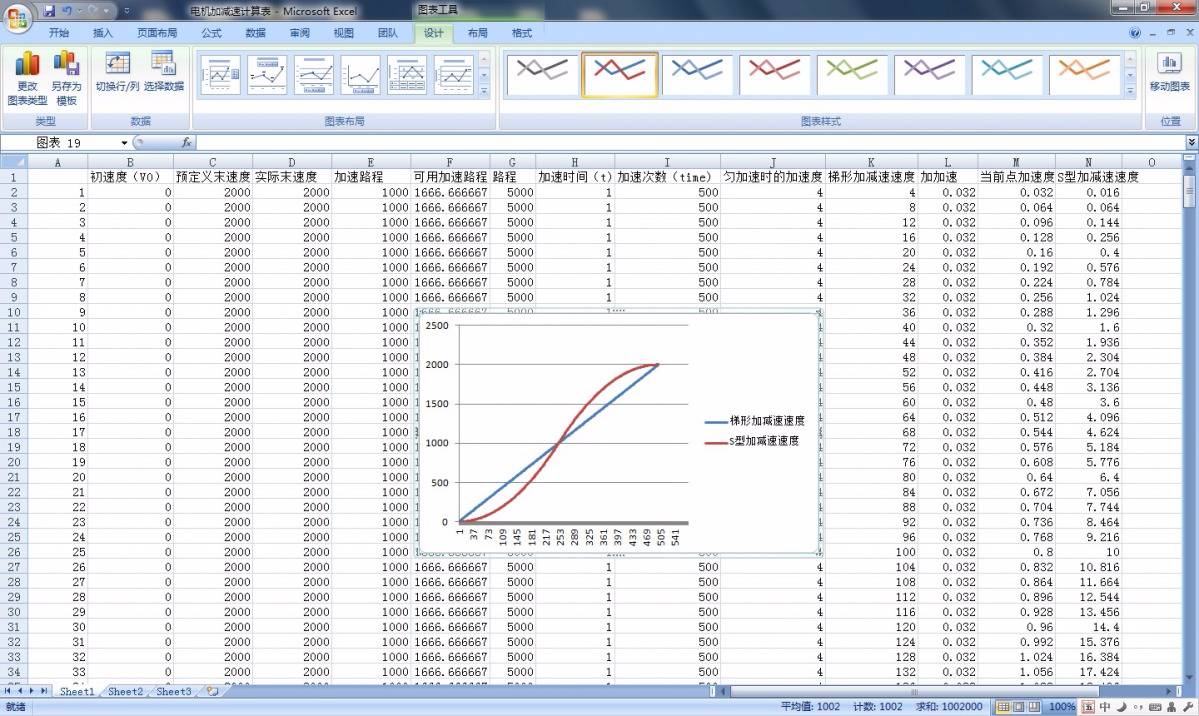
EXCEL文件:
注释已经很详细了,呵呵,我就不多说了!在RTT平台上实现的,虽然跟飞思卡尔没关系,但是看到有很多做电机驱动的,就发出来给大家!
做这段代码的时候用到高中物理中的知识,发点感慨,人不知道什么时候学的东西就能用的上,呵呵!
#ifndef __SPEED_H__
#define __SPEED_H__
#include "rtthread.h"
#include "finsh.h"
/* 三分之一加减速法则:
加速路程不超过三分之一总路程,
这样做的目的是给减速留有足够的时间去检测减速点,
进而实现平稳的将速度减到初速度,
如果在处理速度够快的情况下,
可以选择二分之一加减速
*/
//加减速法则,2分之一法则或3分之一法则
#define SPEEDPRINCIPLE 3
//电机最大转速,单位转/min
#define MOTOMAXSPEED 1500
//电机每转对应的传动距离,单位:mm
#define MOTOROUNDLENGTH 36
//电机最大初速度,初速度超过该值会对电机造成伤害,单位转/min
#define MOTOMAXSTART 200
//驱动器细分数
#define DRIVERSFRACTION 1
//电机细分数
#define MOTOFRACTION 200
//根据初速度,末速度,以及时间,计算加速路程
#define ACCELERATESPACE(V0,Vt,t) (((V0) + (Vt)) * (t) / 2)
//根据加速路程,初速度,以及时间,计算末速度
#define LASTVELOCITY(S,V0,t) (2 * (S) / (t) - (V0))
//根据电机转速(转/min),计算电机步速度(step/s)
#define STEPSPEED(RV) ((RV) * MOTOFRACTION * DRIVERSFRACTION / 60)
//根据长度计算电机所需走的步数,S的单位为mm
#define TOTALSTEP(S) S * MOTOFRACTION * DRIVERSFRACTION / MOTOROUNDLENGTH
struct SPEED
{
int V0; //初速度,单位:step/s
int Vt; //末速度,单位:step/s
long long S; //路程,单位:step
double t; //加速时间,单位:s
int time; //加速次数 单位:次
int *SpeedTab; //加速速度表,速度单位:step/s
int SecSpeedPoint; //减速点 单位:step(在电机运动过程中,如果剩余路程小于等于该值,那么电机开始减速)
};
typedef struct SPEED * Speed_t;
//各参数范围值,可以在此设置参数范围
//初速度大于0小于电机最高起速,末速度大于初速度,小于电机最高转速
#define IS_SPEED(V0,Vt) (((V0) >= 0) && ((V0) <= STEPSPEED(MOTOMAXSTART)) \
&& ((Vt) >= (V0)) && ((Vt) <= STEPSPEED(MOTOMAXSPEED)))
#define IS_SPACE(S) ((S) > 0)
#define IS_ADDTIMING(t) ((t) > 0)
#define IS_ADDTIME(time) ((time) >= 32) //让加速次数必须大于等于32,否则计算表格就没什么意义
#endif
#include "Speed.h"
//函数名称: CalculateSpeedTab
//函数功能:计算加减速表
//参数参数:Speed 速度结构体
// V0; //初速度,单位:step/s
// Vt; //末速度,单位:step/s
// S; //路程,单位:step
// t; //加速时间,单位:s
// time; //加速次数 单位:次
// *SpeedTab; //加速速度表,速度单位:step/s
// SecSpeedPoint; //减速点 单位:step
//返回输出:速度结构体
static Speed_t CalculateSpeedTab(Speed_t Speed)
{
int i;
double aa; //加加速
int DeltaV; //速度变化量
int tempVt;
//如果速度记录表的指针为空,说明没有分配内存
RT_ASSERT(Speed->SpeedTab != RT_NULL);
//各参数是否超范围
RT_ASSERT(IS_SPEED(Speed->V0, Speed->Vt));
RT_ASSERT(IS_SPACE(Speed->S));
RT_ASSERT(IS_ADDTIMING(Speed->t));
RT_ASSERT(IS_ADDTIME(Speed->time));
//根据加速法则计算末速度
tempVt = LASTVELOCITY(Speed->S / SPEEDPRINCIPLE, Speed->V0, Speed->t);
Speed->Vt = (tempVt > Speed->Vt) ? Speed->Vt : tempVt;
Speed->SecSpeedPoint = ACCELERATESPACE(Speed->V0, Speed->Vt, Speed->t); //计算减速点位置,剩余路程为该值时开始减速
aa = (double)((Speed->Vt - Speed->V0) / 2) //加速度变化拐点时的速度值 a| /|\
* 2 //知道直角三角形面积,逆推三角型高度时将面积*2 | / | \面积为DeltaV
/ (Speed->time / 2) //除以底边 | / | \
/ (Speed->time / 2); //再除以底边,得到斜率,即加加速 |/___|___\__time
//开始速度计算
for(i = 0; i < ((Speed->time / 2) + 1); i++)
{
DeltaV = (aa * i * i) / 2; //V = V0 + a * t / 2; a = aa * t;
*(Speed->SpeedTab + i) = Speed->V0 + DeltaV; //当前点的速度
*(Speed->SpeedTab + Speed->time - i) = Speed->Vt - DeltaV; //对称点的速度
}
return Speed;
}
//函数名称:TestSpeed
//函数功能:测试速度表计算函数
//函数参数:V0 初速度,单位:转/min
// Vt 末速度,单位:转/min
// S 路程,单位:mm
// time 加速次数
//函数返回:无
void TestSpeed(int V0, int Vt, int S, int time)
{
int i;
Speed_t Speed = (Speed_t)rt_malloc(sizeof(struct SPEED));
Speed->V0 = STEPSPEED(V0); //起速
Speed->Vt = STEPSPEED(Vt); //末速
Speed->S = TOTALSTEP(S); //路程
Speed->t = 0.2; //加速时间设为0.2秒
Speed->time = time; //加速次数
Speed->SpeedTab = (int *)rt_malloc(sizeof(int) * (Speed->time + 1)); //根据加速次数申请表格内存,加1,以防用的时候超界
CalculateSpeedTab(Speed); //开始计算
for(i = 0; i < Speed->time; i++)
{
rt_kprintf("SpeedTab[%d] = %d, Acceleration = %d\n"
, i
, *(Speed->SpeedTab + i)
, *(Speed->SpeedTab + i + 1) - *(Speed->SpeedTab + i));
}
rt_kprintf("SpeedTab[%d] = %d\n", i, *(Speed->SpeedTab + i));
rt_free(Speed->SpeedTab);
rt_free(Speed);
}
FINSH_FUNCTION_EXPORT(TestSpeed, Test Speed table calculate);